


Этот робот был создан группой европейских учёных в рамках проекта Stiff-Flop. Его прототипом стало щупальце осьминога, отличающееся, как известно, гибкостью, подвижностью и силой.
Гибкость роботизированного щупальца обеспечивается несколькими надувными отсеками, заполняемыми воздухом в управляемом режиме. Жёстким щупальце делается, благодаря центральной трубке, заполненной кофейными зёрнами, из которой откачивают воздух.
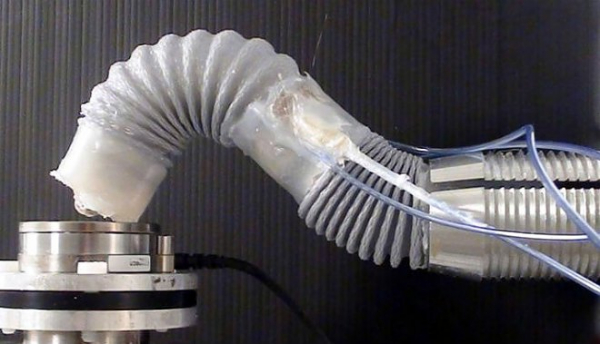
Робот имеет размеры 3 х 14 см и разделён поперёк на две части. Каждая секция состоит из трёх цилиндрических камер, которые в разных вариантах заполняются воздухом, тем самым, удлиняя или сгибая рукоятку.
Один из создателей робота доктор Томмазо Ранзани считает, что он станет незаменимым ассистентом во время сложных операций. В частности, робот сможет при необходимости отодвигать в сторону и удерживать орган в нужном положении, тем самым заменяя множество традиционных хирургических инструментов.

В настоящее время робот проходит стадию испытаний. В дальнейшем, когда его доведут до совершенства, он найдёт своё применение в малоинвазивной хирургии.